Extended Kalman Filter
Unlike the Kalman Filter and the Multivariate Kalman Filter, most real-life systems are non-linear. Understanding the linear Kalman Filter will help to understand how the EKF works.
To handle non-linear systems, the EKF uses linear approximation techniques in which it performs analytic linearization of the model at each point in time.
Modifications for non-linear systems are sub-optimal due to using approximated models.
For a linear system, the measurement equation is in the form but in a non-linear system, in this case, is .
Essential Background
Multivariate Uncertainty Projection
- is an input covariance
- is a projected covariance
- is a state transition matrix Jacobian
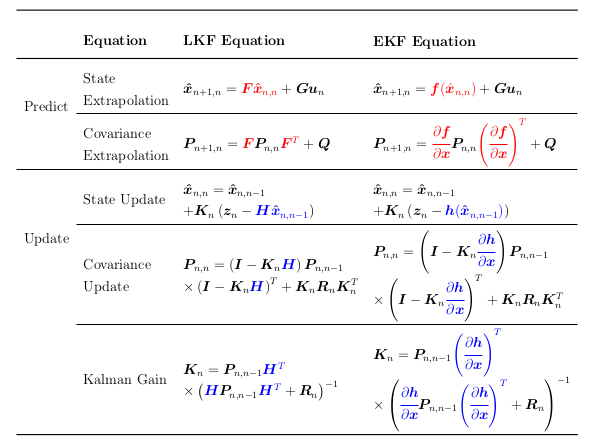
Extended Kalman Filter Equations